Implementando Grad-CAM em Python
Neste exemplo, será utilizado uma base de dados contendo imagens de gatos e cachorros no formato “.jpg”. Este é um conjunto utilizado para estudos, onde seu foco é gerar um modelo capaz de classificar diferentes seres vivos e veículos. Podemos encontrar este conjunto de dados no kaggle. Para simplificar este conjunto, as pastas que não são referentes a gatos ou cachorros foram removidas. É possível baixar o dataset aqui.
Passo 1: Preparação do Ambiente
# Importando bibliotecas necessárias
import zipfile
import numpy as np
import tensorflow as tf
import matplotlib.cm as cm
import matplotlib.pyplot as plt
from tensorflow import keras
from google.colab import drive
from IPython.display import Image, displayPasso 2: Preparação dos Dados
# Extraindo o dataset de meu Google Drive
drive.mount('/content/drive')
# Utilize o caminho do arquivo em seu drive
zf = zipfile.ZipFile('/content/drive/MyDrive/IC_Datasets/PetImages.zip')
zf.extractall()
zf.close()
# Utilizando o modelo Xception como exemplo
model_builder = keras.applications.xception.Xception
preprocess_input = keras.applications.xception.preprocess_input
decode_predictions = keras.applications.xception.decode_predictions
last_conv_layer_name = "block14_sepconv2_act"
# Carregando os dados
img_size = (299, 299)
train_dataset = keras.utils.image_dataset_from_directory(
'/content/PetImages',
image_size=img_size,
batch_size=32
)
train_dataset = train_dataset.map(lambda x, y: (preprocess_input(x), y))Passo 3: Preparando o GRAD-CAM
# Convertendo uma imagem em array
def get_img_array(img_path, size):
img = keras.utils.load_img(img_path, target_size=size)
array = keras.utils.img_to_array(img)
array = np.expand_dims(array, axis=0)
return array
# Método para mapear a imagem de entrada para as ativações da última camada
# convolucional e previsões de saída
def make_gradcam_heatmap(img_array, model, last_conv_layer_name, pred_index=None):
grad_model = keras.models.Model(
model.inputs, [model.get_layer(last_conv_layer_name).output, model.output]
)
# Cálculo do gradiente da classe prevista em relação às ativações da última
# camada convolucional
with tf.GradientTape() as tape:
last_conv_layer_output, preds = grad_model(img_array)
if pred_index is None:
pred_index = tf.argmax(preds[0])
class_channel = preds[:, pred_index]
# Gradiente do neurônio de saída
grads = tape.gradient(class_channel, last_conv_layer_output)
# Vetor onde cada entrada é a intensidade média do gradiente sobre um canal
# específico do mapa de características
pooled_grads = tf.reduce_mean(grads, axis=(0, 1, 2))
# Multiplica-se cada canal no mapa de características por sua importância
# depois são somados todos os canais para obter o heatmap da classe
last_conv_layer_output = last_conv_layer_output[0]
heatmap = last_conv_layer_output @ pooled_grads[..., tf.newaxis]
heatmap = tf.squeeze(heatmap)
# Normalização do heatmap
heatmap = tf.maximum(heatmap, 0) / tf.math.reduce_max(heatmap)
return heatmap.numpy()
# Carrega a imagem original
def save_and_display_gradcam(img_path, heatmap, cam_path="cam.jpg", alpha=0.4):
img = keras.utils.load_img(img_path)
img = keras.utils.img_to_array(img)
# Redimensiona o heatmap para o intervalo de 0 a 255
heatmap = np.uint8(255 * heatmap)
# Usa o mapa de cores "jet" para colorir o heatmap
jet = cm.get_cmap("jet")
# Usa os valores RGB do mapa de cores
jet_colors = jet(np.arange(256))[:, :3]
jet_heatmap = jet_colors[heatmap]
# Cria uma imagem com o heatmap colorido em RGB
jet_heatmap = keras.utils.array_to_img(jet_heatmap)
jet_heatmap = jet_heatmap.resize((img.shape[1], img.shape[0]))
jet_heatmap = keras.utils.img_to_array(jet_heatmap)
# Sobrepõe o heatmap na imagem original
superimposed_img = jet_heatmap * alpha + img
superimposed_img = keras.utils.array_to_img(superimposed_img)
# Salva a imagem sobreposta
superimposed_img.save(cam_path)
# Exibe o Grad-CAM
display(Image(cam_path))Passo 4: Testando o GRAD-CAM
# Caminho das imagens para visualização do GRAD-CAM
cat_img_path = '/content/PetImages/cats/cat.1.jpg'
dog_img_path = '/content/PetImages/dogs/dog.1.jpg'
# Preparação das imagens
cat_img_array = preprocess_input(get_img_array(cat_img_path, size=(299, 299)))
dog_img_array = preprocess_input(get_img_array(dog_img_path, size=(299, 299)))
# Utilizando pesos da imagenet
model = model_builder(weights="imagenet")
# Removendo softmax da última camada
model.layers[-1].activation = None
# Predição e print da classe mais provável
preds = model.predict(cat_img_array)
print("Predicted:", decode_predictions(preds, top=1)[0])
preds = model.predict(dog_img_array)
print("Predicted:", decode_predictions(preds, top=1)[0])
# Gerando heatmaps
cat_heatmap = make_gradcam_heatmap(cat_img_array, model, last_conv_layer_name)
dog_heatmap = make_gradcam_heatmap(dog_img_array, model, last_conv_layer_name)
# Exibindo heatmaps
plt.matshow(cat_heatmap)
plt.matshow(dog_heatmap)
plt.show()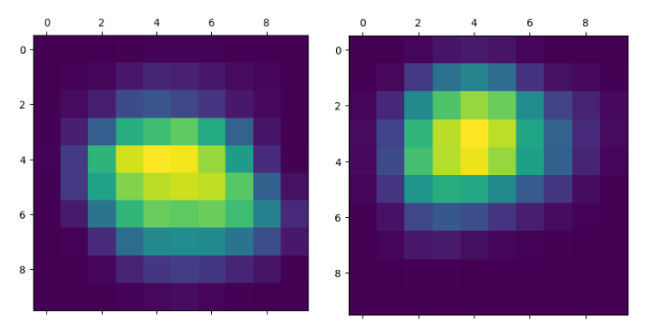
# Exibindo heatmap aplicado nas imagens
save_and_display_gradcam(cat_img_path, cat_heatmap)
save_and_display_gradcam(dog_img_path, dog_heatmap) As imagens acima evidenciam que, para a rede, as regiões próximas aos rostos dos animais foram as mais relevantes para a predição, indicando que o modelo considera essas áreas, como as mais discriminativas para identificar corretamente a classe.
As imagens acima evidenciam que, para a rede, as regiões próximas aos rostos dos animais foram as mais relevantes para a predição, indicando que o modelo considera essas áreas, como as mais discriminativas para identificar corretamente a classe.
Conclusão
Neste post, observamos que o Grad-CAM é uma ferramenta poderosa para interpretar decisões de redes neurais convolucionais, ao destacar visualmente as regiões da imagem mais relevantes para a predição. Sua aplicação contribui para maior transparência, confiança e entendimento dos modelos de visão computacional.
É possível testar este código, a partir do meu notebook no Google Colab. Basta duplicar o notebook e ajustá-lo conforme seus dados e objetivos. Caso surjam dúvidas, consulte a documentação oficial do GRAD-CAM no Keras ou entre em contato comigo.
Referências
Grad-CAM class activation visualization. Keras, 07 mar. 2021. Disponível em: https://keras.io/examples/vision/grad_cam/
Ramprasaath R Selvaraju, Abhishek Das, Ramakrishna Vedantam, Michael Cogswell, Devi Parikh, & Dhruv Batra. (2017). Grad-CAM: Why did you say that?.